Abstract
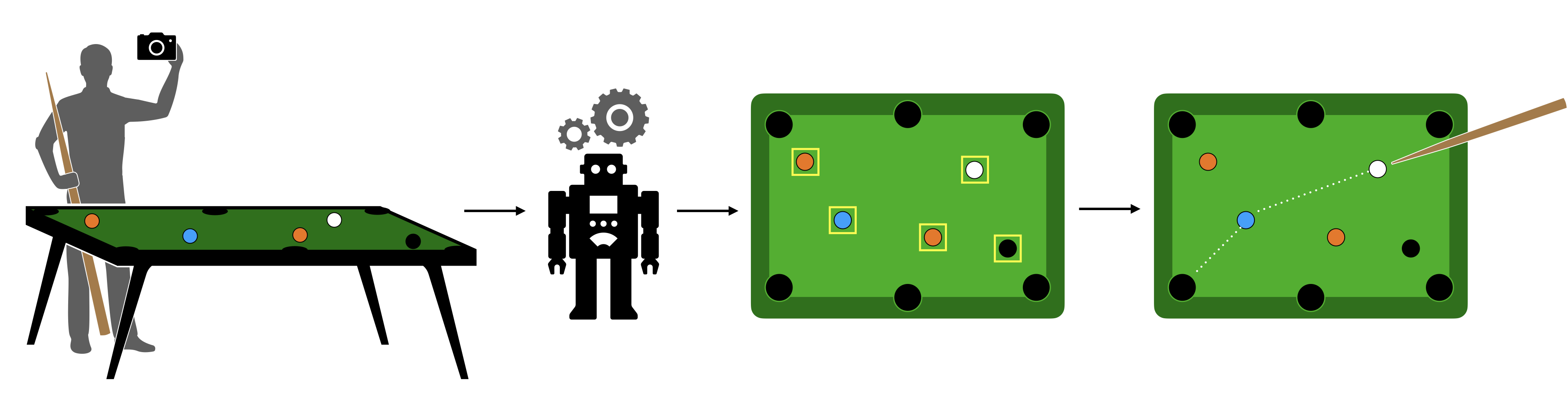
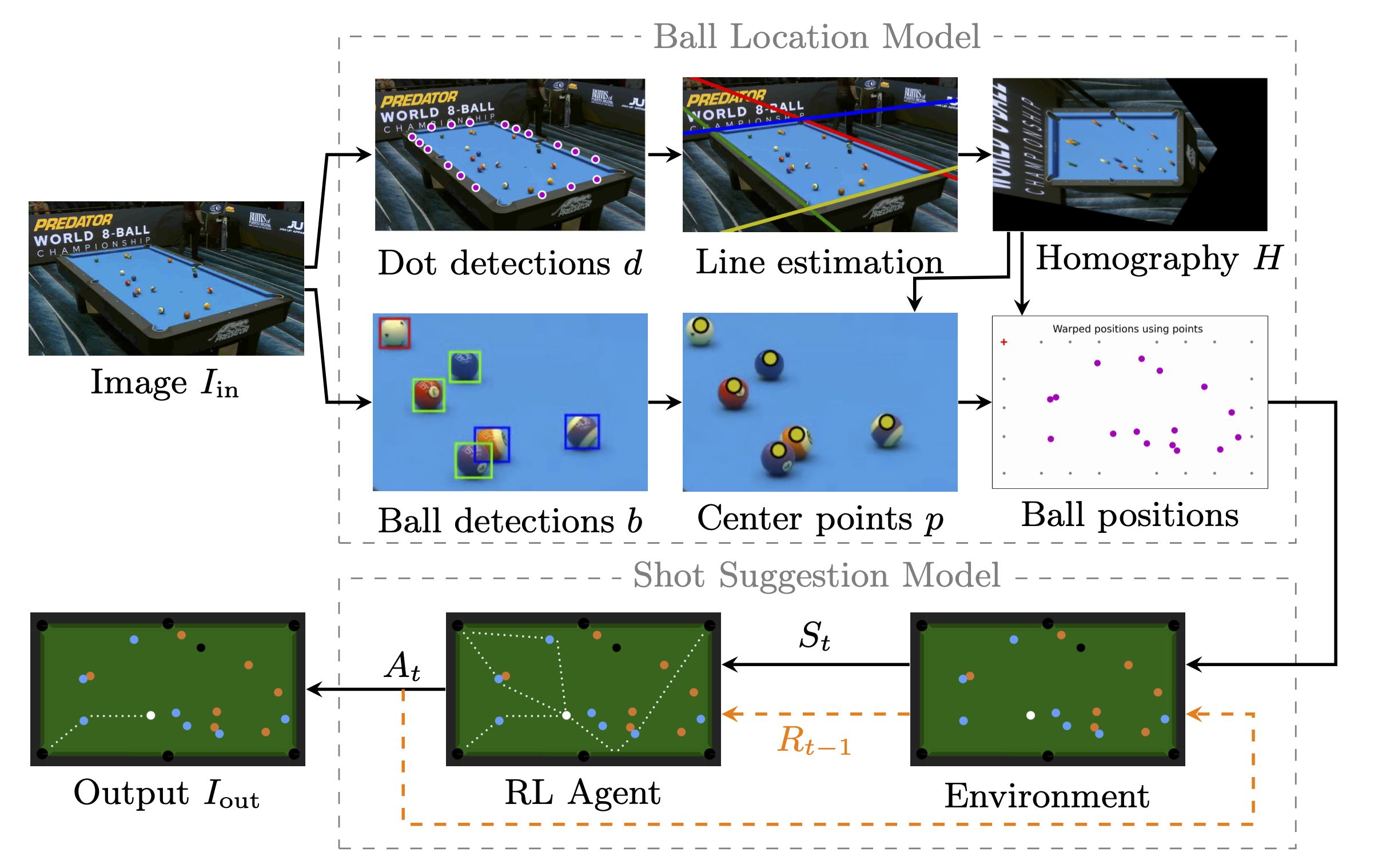
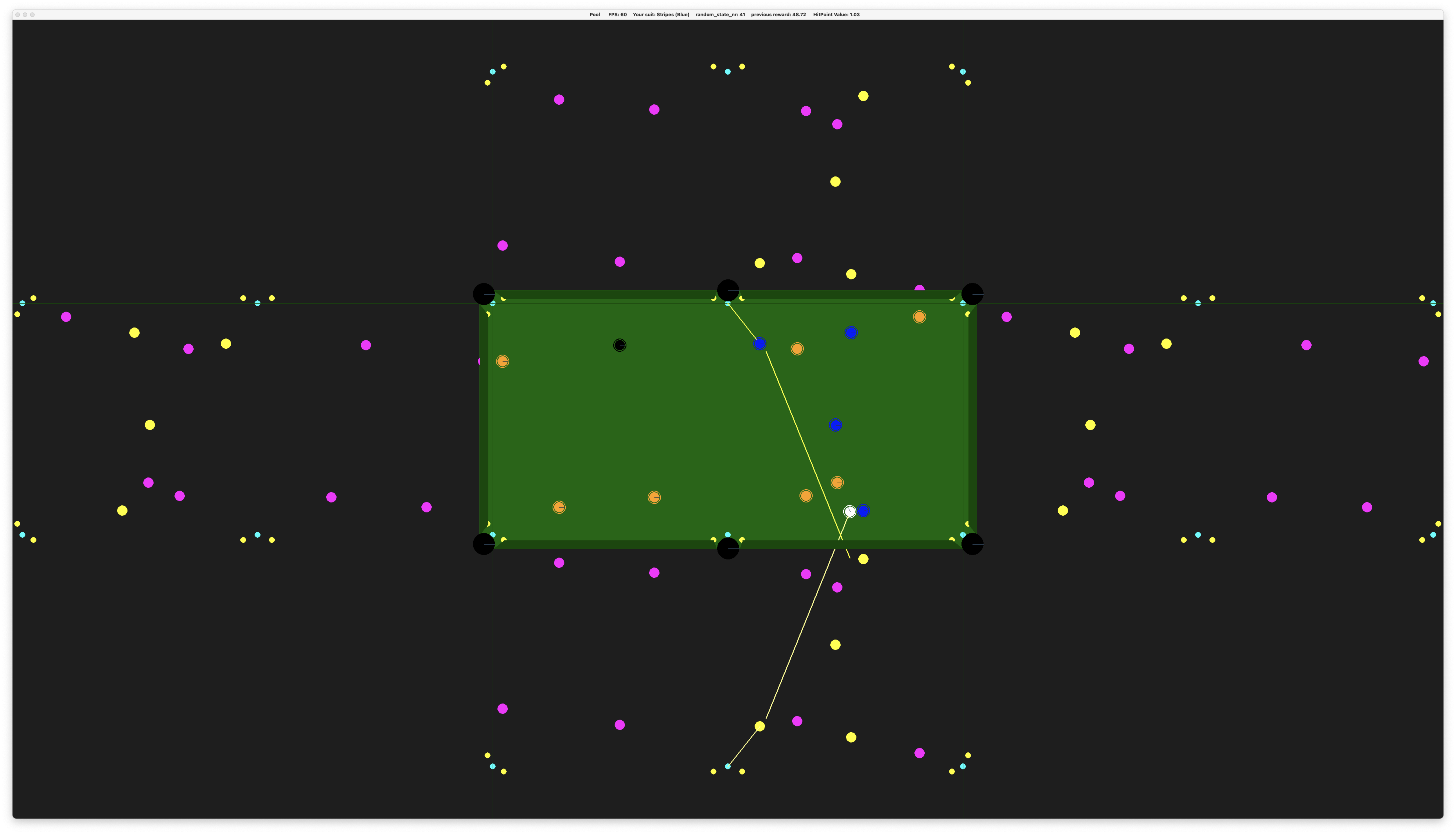
Computer vision models have seen increased usage in sports, and reinforcement learning (RL) is famous for beating humans in strategic games such as Chess and Go. In this paper, we are interested in building upon these advances and examining the game of classic 8-ball pool. We introduce pix2pockets, a foundation for an RL-assisted pool coach. Given a single image of a pool table, we first aim to detect the table and the balls and then propose the optimal shot suggestion. For the first task, we build a dataset with 195 diverse images where we manually annotate all balls and table dots, leading to 5748 object segmentation masks. For the second task, we build a standardized RL environment that allows easy development and benchmarking of any RL algorithm. Our object detection model yields an AP50 of 91.2 while our ball location pipeline obtains an error of only 0.4 cm. Furthermore, we compare standard RL algorithms to set a baseline for the shot suggestion task and we show that all of them fail to pocket all balls without making a foul move. We also present a simple baseline that achieves a per-shot success rate of 94.7% and clears a full game in a single turn 30% of the time.
Abstract
Computer vision models have seen increased usage in sports, and reinforcement learning (RL) is famous for beating humans in strategic games such as Chess and Go. In this paper, we are interested in building upon these advances and examining the game of classic 8-ball pool. We introduce pix2pockets, a foundation for an RL-assisted pool coach. Given a single image of a pool table, we first aim to detect the table and the balls and then propose the optimal shot suggestion. For the first task, we build a dataset with 195 diverse images where we manually annotate all balls and table dots, leading to 5748 object segmentation masks. For the second task, we build a standardized RL environment that allows easy development and benchmarking of any RL algorithm. Our object detection model yields an AP50 of 91.2 while our ball location pipeline obtains an error of only 0.4 cm. Furthermore, we compare standard RL algorithms to set a baseline for the shot suggestion task and we show that all of them fail to pocket all balls without making a foul move. We also present a simple baseline that achieves a per-shot success rate of 94.7% and clears a full game in a single turn 30% of the time.